
My current CNC router has far too much flex and the spindle is too small and weak to machine more than wood or plastics. When I destroyed the spindle some time ago, I decided to retrofit my machine. I will use my Kress spindle which I also use on my small conventional mill. This will increase the tool diameter up to 10 mm in diameter. Now only 3.175 mm are possible. The linear bearings will be replaced by a supported rail bearing system on the X and Y axis. The Z axis is rigid enough because of much less length of the rods. The trapezoidal thread spindles on X and Y will also be replaced by ball screws. Currently I'm using nema 17 motors in combination with pololu drivers, a ramps board and an Arduino Mega which worked quite well but not perfect for a mill (for example: No drilling cycles possible). These parts are normally used to build 3D printers and not milling machines. The motors will be replaced by new nema 23. I will also use Mach3 and a cheap TB6560 board (last post) instead of an Arduino - Marlin/Pronterface setup.
The structural parts are mostly replaced by 10 mm aluminium profiles and an excessive amount of screws. It may look a bit exaggerated but I want a rigid machine to mill at least aluminium. I used some FEM tools of inventor to get a feeling how the gantry may deform. Because I was not educated in modal analysis until now, I used static simulations. The deformations should stay around a few 1/100 mm when not stimulated on a critical frequency.
The structural parts are mostly replaced by 10 mm aluminium profiles and an excessive amount of screws. It may look a bit exaggerated but I want a rigid machine to mill at least aluminium. I used some FEM tools of inventor to get a feeling how the gantry may deform. Because I was not educated in modal analysis until now, I used static simulations. The deformations should stay around a few 1/100 mm when not stimulated on a critical frequency.
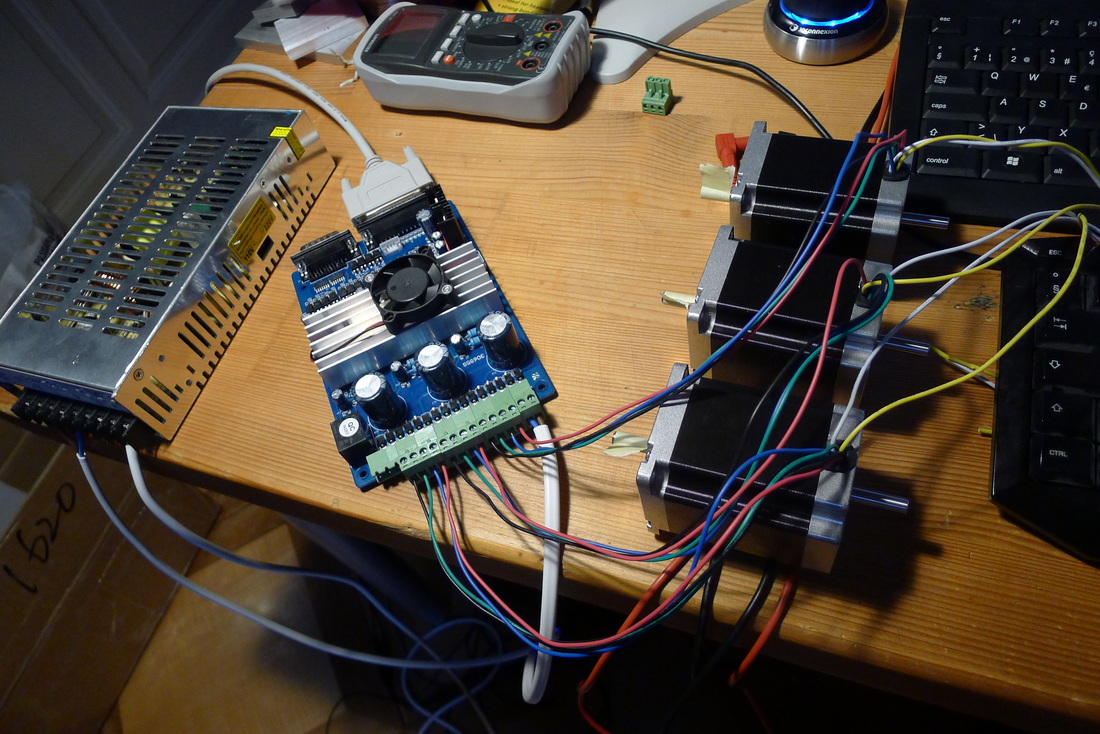
As you can see the mechanical CAD design is almost done. I already started the wiring setup on the Z axis. The rest of the machine will follow. I will also have to design some kind of case for the electronics and power supply. And I'm thinking about hand wheels for the double shafted motors.
 RSS Feed
RSS Feed
